inflatapode
structures gonflables mises en mouvement
projet réalisé en partenariat avec Walomo
sous la direction de Matt Sindall et Sarnsang Na Soontorn
octobre – janvier 2016
ENSCI – Les Ateliers
Dans l’imaginaire collectif, les objets gonflables existent principalement sous deux états : un état gonflé lors de la période d’utilisation et un état dégonflé permettant de faciliter le stockage.
Je cherche ici à questionner cette perception binaire en en explorant les états intermédiaires.
En attirant l’attention sur l’action même de gonfler j’invite à considérer l’objet non comme un système figé mais comme une entité fluide, dynamique, vivante.
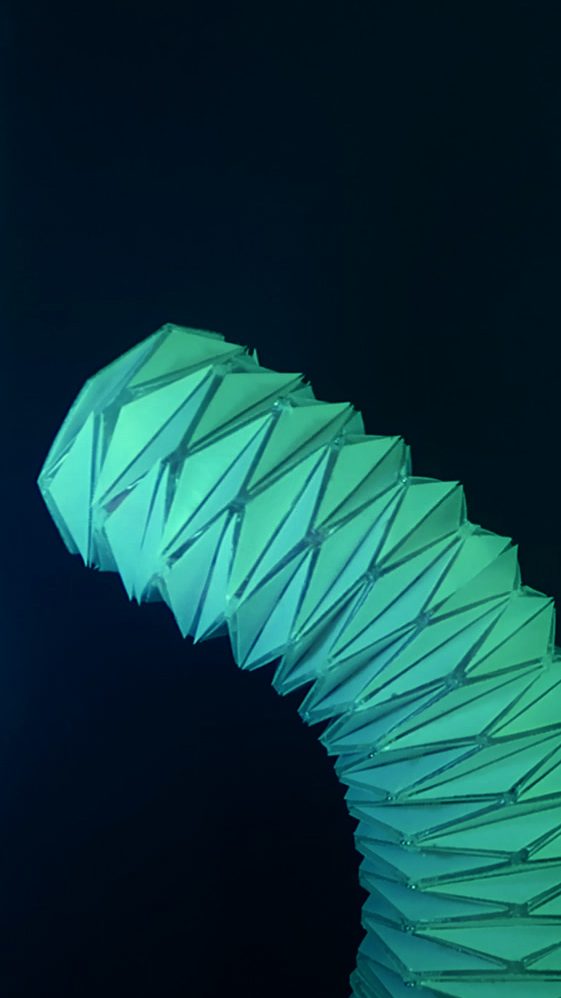
Inflatapode exploite l’infinité de variations de pression, de volume et de forme engendrées par ce procédé pour générer du mouvement. Le bras robotisé contient trois ballons pouvant être gonflés séparément via un progamme Arduino qui contrôle l’alimentation en air de chaque compartiment. Agissant comme des muscles, la synchronisation de ceux-ci permet d’orienter le bras vers la direction désirée. Cet ensemble souple est contenu dans une enveloppe en PVC renforcée par des facettes en polypropylène plus rigides. Le motif en origami assure la stabilité de la structure, les pliures faisant office de guides lorsque le bras se tord ou se rétracte.
Tant que l’air circule, la créature curieuse continue de se contorsionner, découvrant son environnement à l’aide son tentacule.